ConcurrentHashMap 源码分析
本文来自末读代码投稿:https://mp.weixin.qq.com/s/AHWzboztt53ZfFZmsSnMSw ,JavaGuide 对原文进行了大篇幅改进优化。
上一篇文章介绍了 HashMap 源码,反响不错,也有很多同学发表了自己的观点,这次又来了,这次是 ConcurrentHashMap 了,作为线程安全的 HashMap ,它的使用频率也是很高。那么它的存储结构和实现原理是怎么样的呢?
1. ConcurrentHashMap 1.7
1. 存储结构
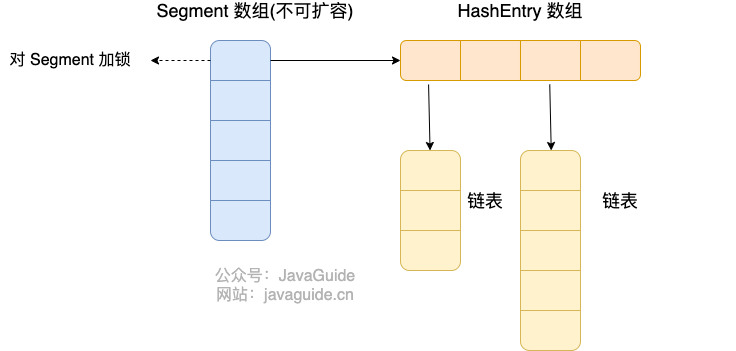
Java 7 中 ConcurrentHashMap 的存储结构如上图,ConcurrentHashMap 由很多个 Segment 组合,而每一个 Segment 是一个类似于 HashMap 的结构,所以每一个 HashMap 的内部可以进行扩容。但是 Segment 的个数一旦初始化就不能改变,默认 Segment 的个数是 16 个,你也可以认为 ConcurrentHashMap 默认支持最多 16 个线程并发。
📝 通俗解释:
- 分段锁:就像把一个大仓库(HashMap)分成了 16 个小房间(Segment)。
- 并发:以前 Hashtable 是锁整个大仓库,谁进去别人都得等。现在 ConcurrentHashMap 是锁小房间。你在 1 号房间干活,我在 2 号房间干活,互不影响。
- 限制:房间数(并发度)一旦建好(初始化)就不能改了。
2. 初始化
通过 ConcurrentHashMap 的无参构造探寻 ConcurrentHashMap 的初始化流程。
/**
* Creates a new, empty map with a default initial capacity (16),
* load factor (0.75) and concurrencyLevel (16).
*/
public ConcurrentHashMap() {
this(DEFAULT_INITIAL_CAPACITY, DEFAULT_LOAD_FACTOR, DEFAULT_CONCURRENCY_LEVEL);
}无参构造中调用了有参构造,传入了三个参数的默认值,他们的值是。
/**
* 默认初始化容量
*/
static final int DEFAULT_INITIAL_CAPACITY = 16;
/**
* 默认负载因子
*/
static final float DEFAULT_LOAD_FACTOR = 0.75f;
/**
* 默认并发级别
*/
static final int DEFAULT_CONCURRENCY_LEVEL = 16;接着看下这个有参构造函数的内部实现逻辑。
@SuppressWarnings("unchecked")
public ConcurrentHashMap(int initialCapacity,float loadFactor, int concurrencyLevel) {
// 参数校验
if (!(loadFactor > 0) || initialCapacity < 0 || concurrencyLevel <= 0)
throw new IllegalArgumentException();
// 校验并发级别大小,大于 1<<16,重置为 65536
if (concurrencyLevel > MAX_SEGMENTS)
concurrencyLevel = MAX_SEGMENTS;
// Find power-of-two sizes best matching arguments
// 2的多少次方
int sshift = 0;
int ssize = 1;
// 这个循环可以找到 concurrencyLevel 之上最近的 2的次方值
while (ssize < concurrencyLevel) {
++sshift;
ssize <<= 1;
}
// 记录段偏移量
this.segmentShift = 32 - sshift;
// 记录段掩码
this.segmentMask = ssize - 1;
// 设置容量
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
// c = 容量 / ssize ,默认 16 / 16 = 1,这里是计算每个 Segment 中的类似于 HashMap 的容量
int c = initialCapacity / ssize;
if (c * ssize < initialCapacity)
++c;
int cap = MIN_SEGMENT_TABLE_CAPACITY;
//Segment 中的类似于 HashMap 的容量至少是2或者2的倍数
while (cap < c)
cap <<= 1;
// create segments and segments[0]
// 创建 Segment 数组,设置 segments[0]
Segment<K,V> s0 = new Segment<K,V>(loadFactor, (int)(cap * loadFactor),
(HashEntry<K,V>[])new HashEntry[cap]);
Segment<K,V>[] ss = (Segment<K,V>[])new Segment[ssize];
UNSAFE.putOrderedObject(ss, SBASE, s0); // ordered write of segments[0]
this.segments = ss;
}总结一下在 Java 7 中 ConcurrentHashMap 的初始化逻辑。
- 必要参数校验。
- 校验并发级别
concurrencyLevel大小,如果大于最大值,重置为最大值。无参构造默认值是 16. - 寻找并发级别
concurrencyLevel之上最近的 2 的幂次方值,作为初始化容量大小,默认是 16。 - 记录
segmentShift偏移量,这个值为【容量 = 2 的 N 次方】中的 N,在后面 Put 时计算位置时会用到。默认是 32 - sshift = 28. - 记录
segmentMask,默认是 ssize - 1 = 16 -1 = 15. - 初始化
segments[0],默认大小为 2,负载因子 0.75,扩容阀值是 2*0.75=1.5,插入第二个值时才会进行扩容。
📝 通俗解释:
- 准备工作:算好一共要分多少个房间(Segment),每个房间多大。
- 模版:先把第 0 号房间(Segment[0])建好,以后其他房间要建的时候,就照着第 0 号房间的标准(容量、负载因子)来建。
3. put
接着上面的初始化参数继续查看 put 方法源码。
/**
* Maps the specified key to the specified value in this table.
* Neither the key nor the value can be null.
*
* <p> The value can be retrieved by calling the <tt>get</tt> method
* with a key that is equal to the original key.
*
* @param key key with which the specified value is to be associated
* @param value value to be associated with the specified key
* @return the previous value associated with <tt>key</tt>, or
* <tt>null</tt> if there was no mapping for <tt>key</tt>
* @throws NullPointerException if the specified key or value is null
*/
public V put(K key, V value) {
Segment<K,V> s;
if (value == null)
throw new NullPointerException();
int hash = hash(key);
// hash 值无符号右移 28位(初始化时获得),然后与 segmentMask=15 做与运算
// 其实也就是把高4位与segmentMask(1111)做与运算
int j = (hash >>> segmentShift) & segmentMask;
if ((s = (Segment<K,V>)UNSAFE.getObject // nonvolatile; recheck
(segments, (j << SSHIFT) + SBASE)) == null) // in ensureSegment
// 如果查找到的 Segment 为空,初始化
s = ensureSegment(j);
return s.put(key, hash, value, false);
}
/**
* Returns the segment for the given index, creating it and
* recording in segment table (via CAS) if not already present.
*
* @param k the index
* @return the segment
*/
@SuppressWarnings("unchecked")
private Segment<K,V> ensureSegment(int k) {
final Segment<K,V>[] ss = this.segments;
long u = (k << SSHIFT) + SBASE; // raw offset
Segment<K,V> seg;
// 判断 u 位置的 Segment 是否为null
if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null) {
Segment<K,V> proto = ss[0]; // use segment 0 as prototype
// 获取0号 segment 里的 HashEntry<K,V> 初始化长度
int cap = proto.table.length;
// 获取0号 segment 里的 hash 表里的扩容负载因子,所有的 segment 的 loadFactor 是相同的
float lf = proto.loadFactor;
// 计算扩容阀值
int threshold = (int)(cap * lf);
// 创建一个 cap 容量的 HashEntry 数组
HashEntry<K,V>[] tab = (HashEntry<K,V>[])new HashEntry[cap];
if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null) { // recheck
// 再次检查 u 位置的 Segment 是否为null,因为这时可能有其他线程进行了操作
Segment<K,V> s = new Segment<K,V>(lf, threshold, tab);
// 自旋检查 u 位置的 Segment 是否为null
while ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u))
== null) {
// 使用CAS 赋值,只会成功一次
if (UNSAFE.compareAndSwapObject(ss, u, null, seg = s))
break;
}
}
}
return seg;
}上面的源码分析了 ConcurrentHashMap 在 put 一个数据时的处理流程,下面梳理下具体流程。
计算要 put 的 key 的位置,获取指定位置的
Segment。如果指定位置的
Segment为空,则初始化这个Segment.初始化 Segment 流程:
- 检查计算得到的位置的
Segment是否为 null. - 为 null 继续初始化,使用
Segment[0]的容量和负载因子创建一个HashEntry数组。 - 再次检查计算得到的指定位置的
Segment是否为 null. - 使用创建的
HashEntry数组初始化这个 Segment. - 自旋判断计算得到的指定位置的
Segment是否为 null,使用 CAS 在这个位置赋值为Segment.
- 检查计算得到的位置的
📝 通俗解释:
- 找房间:先根据 Key 算出你要去哪个房间(Segment)。
- 建房间:如果那个房间还没建(null),就现场建一个(CAS保证只有一个线程建成功)。
- 进房间:进了房间之后,剩下的事情就跟 HashMap 的 put 一样了(当然,进了房间要先加锁)。
Segment.put插入 key,value 值。
上面探究了获取 Segment 段和初始化 Segment 段的操作。最后一行的 Segment 的 put 方法还没有查看,继续分析。
final V put(K key, int hash, V value, boolean onlyIfAbsent) {
// 获取 ReentrantLock 独占锁,获取不到,scanAndLockForPut 获取。
HashEntry<K,V> node = tryLock() ? null : scanAndLockForPut(key, hash, value);
V oldValue;
try {
HashEntry<K,V>[] tab = table;
// 计算要put的数据位置
int index = (tab.length - 1) & hash;
// CAS 获取 index 坐标的值
HashEntry<K,V> first = entryAt(tab, index);
for (HashEntry<K,V> e = first;;) {
if (e != null) {
// 检查是否 key 已经存在,如果存在,则遍历链表寻找位置,找到后替换 value
K k;
if ((k = e.key) == key ||
(e.hash == hash && key.equals(k))) {
oldValue = e.value;
if (!onlyIfAbsent) {
e.value = value;
++modCount;
}
break;
}
e = e.next;
}
else {
// first 有值没说明 index 位置已经有值了,有冲突,链表头插法。
if (node != null)
node.setNext(first);
else
node = new HashEntry<K,V>(hash, key, value, first);
int c = count + 1;
// 容量大于扩容阀值,小于最大容量,进行扩容
if (c > threshold && tab.length < MAXIMUM_CAPACITY)
rehash(node);
else
// index 位置赋值 node,node 可能是一个元素,也可能是一个链表的表头
setEntryAt(tab, index, node);
++modCount;
count = c;
oldValue = null;
break;
}
}
} finally {
unlock();
}
return oldValue;
}由于 Segment 继承了 ReentrantLock,所以 Segment 内部可以很方便的获取锁,put 流程就用到了这个功能。
tryLock()获取锁,获取不到使用scanAndLockForPut方法继续获取。计算 put 的数据要放入的 index 位置,然后获取这个位置上的
HashEntry。遍历 put 新元素,为什么要遍历?因为这里获取的
HashEntry可能是一个空元素,也可能是链表已存在,所以要区别对待。如果这个位置上的
HashEntry不存在:- 如果当前容量大于扩容阀值,小于最大容量,进行扩容。
- 直接头插法插入。
如果这个位置上的
HashEntry存在:- 判断链表当前元素 key 和 hash 值是否和要 put 的 key 和 hash 值一致。一致则替换值
- 不一致,获取链表下一个节点,直到发现相同进行值替换,或者链表表里完毕没有相同的。
- 如果当前容量大于扩容阀值,小于最大容量,进行扩容。
- 直接链表头插法插入。
如果要插入的位置之前已经存在,替换后返回旧值,否则返回 null.
这里面的第一步中的 scanAndLockForPut 操作这里没有介绍,这个方法做的操作就是不断的自旋 tryLock() 获取锁。当自旋次数大于指定次数时,使用 lock() 阻塞获取锁。在自旋时顺表获取下 hash 位置的 HashEntry。
private HashEntry<K,V> scanAndLockForPut(K key, int hash, V value) {
HashEntry<K,V> first = entryForHash(this, hash);
HashEntry<K,V> e = first;
HashEntry<K,V> node = null;
int retries = -1; // negative while locating node
// 自旋获取锁
while (!tryLock()) {
HashEntry<K,V> f; // to recheck first below
if (retries < 0) {
if (e == null) {
if (node == null) // speculatively create node
node = new HashEntry<K,V>(hash, key, value, null);
retries = 0;
}
else if (key.equals(e.key))
retries = 0;
else
e = e.next;
}
else if (++retries > MAX_SCAN_RETRIES) {
// 自旋达到指定次数后,阻塞等到只到获取到锁
lock();
break;
}
else if ((retries & 1) == 0 &&
(f = entryForHash(this, hash)) != first) {
e = first = f; // re-traverse if entry changed
retries = -1;
}
}
return node;
}
> **📝 通俗解释**:
>
> - **put 流程**:
> 1. **定位**:先算出 Key 属于哪个 Segment。
> 2. **加锁**:尝试获取这个 Segment 的锁(ReentrantLock)。如果获取失败,会自旋(tryLock)几次,还不行就阻塞等待(lock)。
> 3. **插入**:拿到锁后,就在这个 Segment 内部(像个小 HashMap)做插入操作。
> 4. **扩容**:如果 Segment 满了,只扩容这个 Segment,不影响其他的。4. 扩容 rehash
ConcurrentHashMap 的扩容只会扩容到原来的两倍。老数组里的数据移动到新的数组时,位置要么不变,要么变为 index+ oldSize,参数里的 node 会在扩容之后使用链表头插法插入到指定位置。
private void rehash(HashEntry<K,V> node) {
HashEntry<K,V>[] oldTable = table;
// 老容量
int oldCapacity = oldTable.length;
// 新容量,扩大两倍
int newCapacity = oldCapacity << 1;
// 新的扩容阀值
threshold = (int)(newCapacity * loadFactor);
// 创建新的数组
HashEntry<K,V>[] newTable = (HashEntry<K,V>[]) new HashEntry[newCapacity];
// 新的掩码,默认2扩容后是4,-1是3,二进制就是11。
int sizeMask = newCapacity - 1;
for (int i = 0; i < oldCapacity ; i++) {
// 遍历老数组
HashEntry<K,V> e = oldTable[i];
if (e != null) {
HashEntry<K,V> next = e.next;
// 计算新的位置,新的位置只可能是不变或者是老的位置+老的容量。
int idx = e.hash & sizeMask;
if (next == null) // Single node on list
// 如果当前位置还不是链表,只是一个元素,直接赋值
newTable[idx] = e;
else { // Reuse consecutive sequence at same slot
// 如果是链表了
HashEntry<K,V> lastRun = e;
int lastIdx = idx;
// 新的位置只可能是不变或者是老的位置+老的容量。
// 遍历结束后,lastRun 后面的元素位置都是相同的
for (HashEntry<K,V> last = next; last != null; last = last.next) {
int k = last.hash & sizeMask;
if (k != lastIdx) {
lastIdx = k;
lastRun = last;
}
}
// ,lastRun 后面的元素位置都是相同的,直接作为链表赋值到新位置。
newTable[lastIdx] = lastRun;
// Clone remaining nodes
for (HashEntry<K,V> p = e; p != lastRun; p = p.next) {
// 遍历剩余元素,头插法到指定 k 位置。
V v = p.value;
int h = p.hash;
int k = h & sizeMask;
HashEntry<K,V> n = newTable[k];
newTable[k] = new HashEntry<K,V>(h, p.key, v, n);
}
}
}
}
// 头插法插入新的节点
int nodeIndex = node.hash & sizeMask; // add the new node
node.setNext(newTable[nodeIndex]);
newTable[nodeIndex] = node;
table = newTable;
}有些同学可能会对最后的两个 for 循环有疑惑,这里第一个 for 是为了寻找这样一个节点,这个节点后面的所有 next 节点的新位置都是相同的。然后把这个作为一个链表赋值到新位置。第二个 for 循环是为了把剩余的元素通过头插法插入到指定位置链表。这样实现的原因可能是基于概率统计,有深入研究的同学可以发表下意见。
内部第二个 for 循环中使用了 new HashEntry<K,V>(h, p.key, v, n) 创建了一个新的 HashEntry,而不是复用之前的,是因为如果复用之前的,那么会导致正在遍历(如正在执行 get 方法)的线程由于指针的修改无法遍历下去。正如注释中所说的:
当它们不再被可能正在并发遍历表的任何读取线程引用时,被替换的节点将被垃圾回收。
The nodes they replace will be garbage collectable as soon as they are no longer referenced by any reader thread that may be in the midst of concurrently traversing table
为什么需要再使用一个 for 循环找到 lastRun ,其实是为了减少对象创建的次数,正如注解中所说的:
从统计上看,在默认的阈值下,当表容量加倍时,只有大约六分之一的节点需要被克隆。
Statistically, at the default threshold, only about one-sixth of them need cloning when a table doubles.
📝 通俗解释:
- 局部扩容:ConcurrentHashMap 扩容不是整个大仓库一起扩,而是哪个小房间(Segment)满了,就只扩那个房间。
- 两倍扩容:每次扩容变成原来的 2 倍。
- 搬家规则:搬家时,元素要么还在原来的位置,要么跑到(原位置 + 原容量)的位置,非常规律。
5. get
到这里就很简单了,get 方法只需要两步即可。
- 计算得到 key 的存放位置。
- 遍历指定位置查找相同 key 的 value 值。
public V get(Object key) {
Segment<K,V> s; // manually integrate access methods to reduce overhead
HashEntry<K,V>[] tab;
int h = hash(key);
long u = (((h >>> segmentShift) & segmentMask) << SSHIFT) + SBASE;
// 计算得到 key 的存放位置
if ((s = (Segment<K,V>)UNSAFE.getObjectVolatile(segments, u)) != null &&
(tab = s.table) != null) {
for (HashEntry<K,V> e = (HashEntry<K,V>) UNSAFE.getObjectVolatile
(tab, ((long)(((tab.length - 1) & h)) << TSHIFT) + TBASE);
e != null; e = e.next) {
// 如果是链表,遍历查找到相同 key 的 value。
K k;
if ((k = e.key) == key || (e.hash == h && key.equals(k)))
return e.value;
}
}
return null;
}
> **📝 通俗解释**:
> - **高效读取**:读数据(get)不需要加锁!
> - **为什么**:因为用了 `volatile` 关键字修饰了核心数据,保证你能看到最新的数据,所以放心读,速度非常快。
## 2. ConcurrentHashMap 1.8
总的来说 ,`ConcurrentHashMap` 在 Java8 中相对于 Java7 来说变化还是挺大的,
### 1. 存储结构
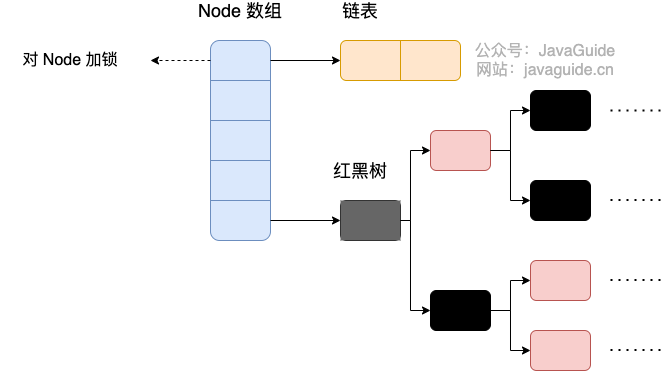
可以发现 Java8 的 ConcurrentHashMap 相对于 Java7 来说变化比较大,不再是之前的 **Segment 数组 + HashEntry 数组 + 链表**,而是 **Node 数组 + 链表 / 红黑树**。当冲突链表达到一定长度时,链表会转换成红黑树。
> **📝 通俗解释**:
> - **大变身**:JDK 1.8 的 ConcurrentHashMap 抛弃了 1.7 的“分段锁”设计,变得更像 HashMap(数组+链表+红黑树)。
> - **锁粒度更细**:以前锁一个房间(Segment),现在锁一个柜子(Node)。只要大家不往同一个柜子里放东西,就可以同时干活,并发度更高。
### 2. 初始化 initTable
```java
/**
* Initializes table, using the size recorded in sizeCtl.
*/
private final Node<K,V>[] initTable() {
Node<K,V>[] tab; int sc;
while ((tab = table) == null || tab.length == 0) {
// 如果 sizeCtl < 0 ,说明另外的线程执行CAS 成功,正在进行初始化。
if ((sc = sizeCtl) < 0)
// 让出 CPU 使用权
Thread.yield(); // lost initialization race; just spin
else if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {
try {
if ((tab = table) == null || tab.length == 0) {
int n = (sc > 0) ? sc : DEFAULT_CAPACITY;
@SuppressWarnings("unchecked")
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n];
table = tab = nt;
sc = n - (n >>> 2);
}
} finally {
sizeCtl = sc;
}
break;
}
}
return tab;
}从源码中可以发现 ConcurrentHashMap 的初始化是通过自旋和 CAS 操作完成的。里面需要注意的是变量 sizeCtl (sizeControl 的缩写),它的值决定着当前的初始化状态。
- -1 说明正在初始化,其他线程需要自旋等待
- -N 说明 table 正在进行扩容,高 16 位表示扩容的标识戳,低 16 位减 1 为正在进行扩容的线程数
- 0 表示 table 初始化大小,如果 table 没有初始化
- >0 表示 table 扩容的阈值,如果 table 已经初始化。
📝 通俗解释:
- 抢着干活:大家(线程)都想去初始化数组。
- CAS 机制:谁先抢到(CAS 成功把 sizeCtl 设为 -1),谁就去干活。
- 自觉让路:抢不到的线程(发现 sizeCtl < 0),就乖乖让出 CPU(Thread.yield),等着别人干完。
3. put
直接过一遍 put 源码。
public V put(K key, V value) {
return putVal(key, value, false);
}
/** Implementation for put and putIfAbsent */
final V putVal(K key, V value, boolean onlyIfAbsent) {
// key 和 value 不能为空
if (key == null || value == null) throw new NullPointerException();
int hash = spread(key.hashCode());
int binCount = 0;
for (Node<K,V>[] tab = table;;) {
// f = 目标位置元素
Node<K,V> f; int n, i, fh;// fh 后面存放目标位置的元素 hash 值
if (tab == null || (n = tab.length) == 0)
// 数组桶为空,初始化数组桶(自旋+CAS)
tab = initTable();
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {
// 桶内为空,CAS 放入,不加锁,成功了就直接 break 跳出
if (casTabAt(tab, i, null,new Node<K,V>(hash, key, value, null)))
break; // no lock when adding to empty bin
}
else if ((fh = f.hash) == MOVED)
tab = helpTransfer(tab, f);
else {
V oldVal = null;
// 使用 synchronized 加锁加入节点
synchronized (f) {
if (tabAt(tab, i) == f) {
// 说明是链表
if (fh >= 0) {
binCount = 1;
// 循环加入新的或者覆盖节点
for (Node<K,V> e = f;; ++binCount) {
K ek;
if (e.hash == hash &&
((ek = e.key) == key ||
(ek != null && key.equals(ek)))) {
oldVal = e.val;
if (!onlyIfAbsent)
e.val = value;
break;
}
Node<K,V> pred = e;
if ((e = e.next) == null) {
pred.next = new Node<K,V>(hash, key,
value, null);
break;
}
}
}
else if (f instanceof TreeBin) {
// 红黑树
Node<K,V> p;
binCount = 2;
if ((p = ((TreeBin<K,V>)f).putTreeVal(hash, key,
value)) != null) {
oldVal = p.val;
if (!onlyIfAbsent)
p.val = value;
}
}
}
}
if (binCount != 0) {
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i);
if (oldVal != null)
return oldVal;
break;
}
}
}
addCount(1L, binCount);
return null;
}根据 key 计算出 hashcode 。
判断是否需要进行初始化。
即为当前 key 定位出的 Node,如果为空表示当前位置可以写入数据,利用 CAS 尝试写入,失败则自旋保证成功。
如果当前位置的
hashcode == MOVED == -1,则需要进行扩容。如果都不满足,则利用 synchronized 锁写入数据。
如果数量大于
TREEIFY_THRESHOLD则要执行树化方法,在treeifyBin中会首先判断当前数组长度 ≥64 时才会将链表转换为红黑树。
📝 通俗解释:
- 流程:
- 没东西:柜子是空的?直接放进去(CAS),不用排队。
- 有东西:柜子里已经有东西了?
- 正在搬家(MOVED):帮忙一起搬(helpTransfer)。
- 正常:锁住这个柜子(synchronized),然后把新东西挂在后面(链表/红黑树)。
- 亮点:只锁这一个柜子,不影响别人用其他柜子。
4. get
get 流程比较简单,直接过一遍源码。
public V get(Object key) {
Node<K,V>[] tab; Node<K,V> e, p; int n, eh; K ek;
// key 所在的 hash 位置
int h = spread(key.hashCode());
if ((tab = table) != null && (n = tab.length) > 0 &&
(e = tabAt(tab, (n - 1) & h)) != null) {
// 如果指定位置元素存在,头结点hash值相同
if ((eh = e.hash) == h) {
if ((ek = e.key) == key || (ek != null && key.equals(ek)))
// key hash 值相等,key值相同,直接返回元素 value
return e.val;
}
else if (eh < 0)
// 头结点hash值小于0,说明正在扩容或者是红黑树,find查找
return (p = e.find(h, key)) != null ? p.val : null;
while ((e = e.next) != null) {
// 是链表,遍历查找
if ((e.hash == h) &&
((ek = e.key) == key || (ek != null && key.equals(ek))))
return e.val;
}
}
return null;
}📝 通俗解释:
- 全程无锁:找东西从来不需要排队(不加锁)。
- 原理:因为数组(Node[])和节点(Node)里的数据(val, next)都是
volatile修饰的,保证了你看到的永远是最新的。
总结一下 get 过程:
- 根据 hash 值计算位置。
- 查找到指定位置,如果头节点就是要找的,直接返回它的 value.
- 如果头节点 hash 值小于 0 ,说明正在扩容或者是红黑树,查找之。
- 如果是链表,遍历查找之。
5. size 计数
ConcurrentHashMap 的 size() 方法用来获取当前 Map 中元素的总数,但在高并发场景下,如何准确且高效地统计元素数量是一个技术难点。Java8 采用了一套精巧的分段计数机制来解决这个问题。
5.1 为什么需要分段计数
在并发环境下,如果多个线程同时执行 put 操作,它们都需要更新元素总数。如果使用一个共享的计数器变量,就会导致激烈的竞争——所有线程都在争抢同一个变量的修改权,这会严重影响性能。
为了解决这个问题,ConcurrentHashMap 采用了分散热点的设计思想:不使用单一计数器,而是将计数分散到多个变量中。就像银行不会只开一个窗口办业务,而是开多个窗口分流客户一样,这样可以大大减少冲突。
5.2 baseCount 和 counterCells 的设计
ConcurrentHashMap 内部维护了两个关键的计数相关字段:
- baseCount:基础计数器,在没有竞争的情况下,直接通过 CAS 更新这个变量。可以把它理解为"主计数器"。
- counterCells:计数器数组。当多个线程竞争
baseCount失败时,会尝试将计数增量分散到counterCells数组的不同位置。- 每个线程根据自己的 Probe 值(可理解为线程 ID 生成的一种哈希码)映射到数组的某个槽位,优先在这个“偏向的格子”里进行累加。
- 注意:这个格子并不是严格意义上的“线程私有”,当哈希冲突时,多个线程仍然可能映射到同一个槽位并发更新。
举个例子:假设有 10 个线程同时往 Map 中添加元素。第一个线程成功通过 CAS 更新了 baseCount,但后面 9 个线程在更新 baseCount 时发现有竞争,就会转而去 counterCells 数组中找一个位置进行累加。这 9 个线程可能分散到数组的不同位置(比如线程 2 在 counterCells[1],线程 3 在 counterCells[2]),从而将竞争从一个点分散到了多个点。。
5.3 put 元素时如何更新计数
在 putVal 方法的最后,我们可以看到调用了 addCount(1L, binCount) 方法,这个方法就是用来更新元素计数的。
addCount 的执行逻辑大致可以概括为:
优先尝试更新 baseCount
- 如果当前还没有启用
counterCells(counterCells == null),线程会先尝试通过 CAS 直接更新baseCount。 - 如果 CAS 成功,说明竞争不激烈,直接返回即可。
- 如果当前还没有启用
竞争出现时,转向 counterCells
- 如果 CAS 更新
baseCount失败(说明有其他线程在竞争),或者counterCells已经存在(说明系统之前已经遇到过竞争),线程就会尝试在counterCells中更新:- 根据自己的 probe 值映射到某个槽位;
- 对该槽位对应的
CounterCell做一次 CAS 累加。
- 如果这个槽位为空或 CAS 仍然冲突,就会进入一个更“重”的路径
fullAddCount,在里面负责初始化槽位、重新选择槽位等。
- 如果 CAS 更新
动态初始化与扩容 counterCells
- 当检测到竞争比较激烈(例如:某个 cell 的 CAS 也频繁失败)时,
fullAddCount会在一个轻量级的自旋锁cellsBusy保护下:- 如果
counterCells还没初始化,就初始化一个较小的数组(比如长度 2); - 如果已经存在并且长度还没达到上限(通常不超过 CPU 核数),就按 2 倍进行扩容,增加更多的计数槽位,把线程进一步打散。
- 如果
- 当检测到竞争比较激烈(例如:某个 cell 的 CAS 也频繁失败)时,
这种设计保证了:在低并发时只使用简单的 baseCount,路径非常短;在高并发时则自动切换到分段计数,通过 counterCells 和扩容机制摊薄竞争,兼顾了性能和准确性。
5.4 sumCount 如何计算元素总数
当我们调用 size() 方法时,最终会调用 sumCount() 方法来计算元素总数。sumCount() 的逻辑非常简单直接:
- 读取
baseCount的值作为基础值。 - 遍历
counterCells数组,将所有非空位置的计数值累加到基础值上。 - 返回累加结果。
注意:
- 弱一致性:
sumCount()全程不加锁。在计算期间如果有其他线程插入数据,返回的结果只是一个近似值。但在高并发场景下,追求“刹那间的精确总数”代价过大且无意义,近似值通常已足够。 - 整型溢出:
size()方法返回int类型。如果元素数量超过Integer.MAX_VALUE,它只会返回Integer.MAX_VALUE。如果需要获取精确的大容量计数,建议使用 Java 8 新增的mappingCount()方法,该方法返回long类型。
📝 通俗解释:
- 难题:想知道整个 Map 有多少个元素(size),在并发下很难,因为一直在变。
- 分头记账:JDK 1.8 采用“分头记账”法。
- baseCount:平时大家往这就记。
- counterCells:如果太忙了(冲突),就搞几个小本子(counterCells 数组),大家分头记。
- 算总账:最后把 baseCount 和所有小本子上的数字加起来,就是总数。虽然可能有一点点误差(因为一直在变),但在高并发下性能极高。
3. 总结
Java7 中 ConcurrentHashMap 使用的分段锁,也就是每一个 Segment 上同时只有一个线程可以操作,每一个 Segment 都是一个类似 HashMap 数组的结构,它可以扩容,它的冲突会转化为链表。但是 Segment 的个数一但初始化就不能改变。
Java8 中的 ConcurrentHashMap 使用的 Synchronized 锁加 CAS 的机制。结构也由 Java7 中的 Segment 数组 + HashEntry 数组 + 链表 进化成了 Node 数组 + 链表 / 红黑树,Node 是类似于一个 HashEntry 的结构。它的冲突再达到一定大小时会转化成红黑树,在冲突小于一定数量时又退回链表。
有些同学可能对 Synchronized 的性能存在疑问,其实 Synchronized 锁自从引入锁升级策略后,性能不再是问题,有兴趣的同学可以自己了解下 Synchronized 的锁升级。
📝 通俗解释:
- JDK 1.7:像把大仓库分成几个小房间(Segment),每个房间一把锁。
- JDK 1.8:不分房间了,直接锁货物(Node)。用了 CAS(乐观锁)和 Synchronized(悲观锁)结合,锁得更细,并发更高。
- Synchronized:以前觉得它慢,现在经过优化(锁升级)已经很快了,放心用。